3ツールで作るドローン測量コース実践ガイド - ジェネレーターから DJI KMZ 出力まで
ワークフロー全体像
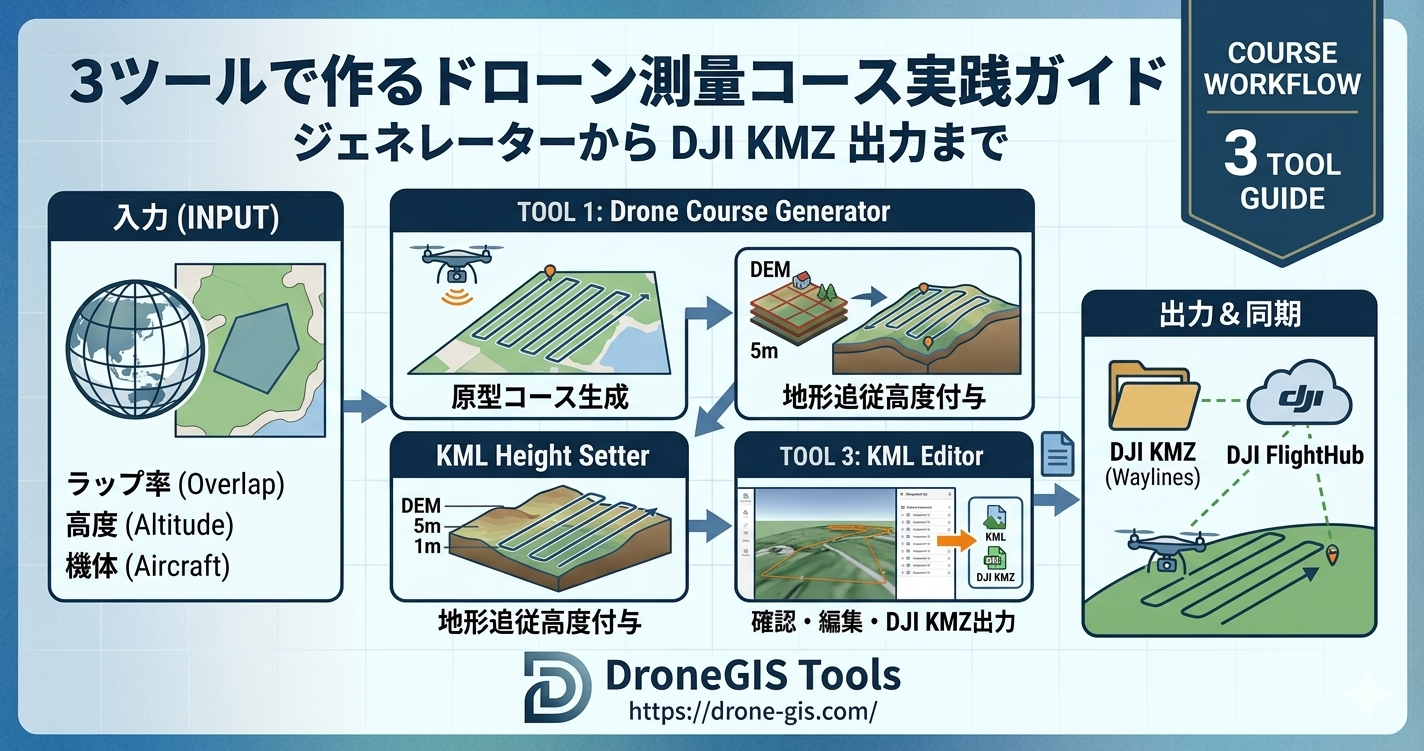
ドローン測量のフライトコースは、単一のソフトで完結させるよりも、役割の異なるツールを組み合わせた方が柔軟かつ安全に作成できます。本記事では、当サイトの3つのツール(ドローンコースジェネレーター・KML高度設定ツール・KMLエディター)と、必要に応じたCADソフト・Google Earthを組み合わせた実践的なワークフローを解説します。最終的にはDJI形式のKMZとして書き出し、DJI FlightHub経由で機体に転送する流れを想定しています。
全体の流れは次の4ステップです。コースジェネレーターで原型を作り、必要なら平面形状をCADで微修正、KML高度設定ツールでDEMに沿った高度を付与し、最後にKMLエディターで確認・形式変換まで行います。
ステップ1: コースジェネレーターで原型作成
ドローンコースジェネレーターは、対象エリアと撮影パラメータからフライトコースを自動生成するブラウザツールです。地図上で測量範囲のポリゴンを描き、機体・カメラ機種、対地高度、オーバーラップ率(OL)、サイドラップ率(SL)などを指定すると、平行線パターンの飛行コースが即座に描画されます。
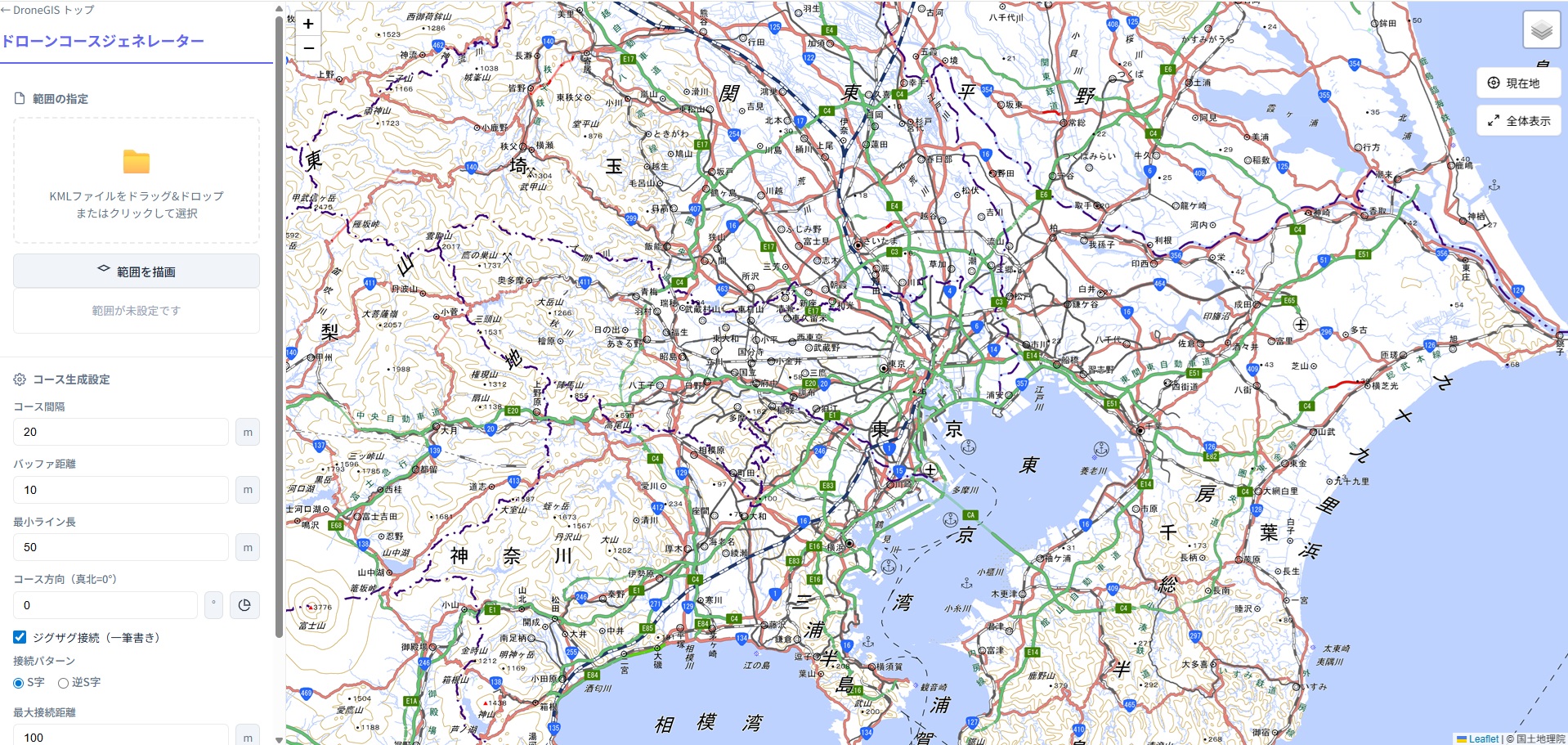
このステップで決定するのは「平面的なコース形状」だけです。具体的には、コースの向き(方位)、コース間隔、撮影間隔、進入退出経路の4要素になります。地形の起伏に対する高度設定は次以降のステップで扱うため、ここでは要求精度から逆算した対地高度の設計値(公称値)を入力しておけば十分です。
| 入力項目 | 典型的な設定例 | 備考 |
|---|---|---|
| 対地高度 | 60〜100m | 要求GSDから算出。航空法上は対地150m未満 |
| OL / SL | 80% / 60% | i-Construction準拠。起伏が大きい場合はSLを引き上げる |
| コース方位 | 長辺に沿った方向 | 旋回回数を最小化しバッテリー効率を高める |
| 機体・カメラ | Mavic 3E / Phantom 4 RTK 等 | センサー幅と画像幅から自動でフットプリント計算 |
生成結果はKMLファイルとしてエクスポートできます。出力されるKMLには、撮影エリアのPolygonと、コース経路のLineStringまたはウェイポイント列のPlacemarkが含まれます。次のステップで扱うため、ファイル名は内容がわかる形(例: siteA_course_h80.kml)にしておくと管理しやすくなります。
ステップ2: 必要に応じてCADソフトで調整
自動生成されたコースは、対象エリアの形状によっては実情と合わない部分が出ます。たとえば敷地内に飛行禁止の構造物がある、隣接地への侵入を避けたい、特定区画だけ重点的に撮影したい、といったケースです。こうした調整は、汎用CADソフト(AutoCAD、Jw_cad、QGIS等)でKMLを直接読み込んで編集するのが最も柔軟です。
CADでの典型的な編集作業は次の3点に集約されます。
- 不要区間のトリミング: 撮影が不要な部分のコース線を削除する。コースの端点を整え、進入退出のマージンを確保する。
- 追加コースの挿入: 重点区画にダブルグリッド相当のクロスコースを追加する。建物の壁面把握など、垂直方向のテクスチャが必要な場合に有効。
- ウェイポイント間隔の調整: 機体側の処理上限(DJI Pilot 2では1ミッションあたり99ウェイポイント等)を超えないよう、ポイントを間引く。
編集後はKML形式で保存します。CADソフトによってはKMZや独自形式でしか書き出せない場合がありますが、その場合でも次のステップのKML高度設定ツールおよびKMLエディターはKMZの読み込みに対応しているため、形式変換は最小限で済みます。なお、このステップは必須ではありません。コースジェネレーターの出力がそのまま使える現場では飛ばしてかまいません。
ステップ3: KML高度設定ツールで地形追従高度を付与
KML高度設定ツールは、KMLに含まれる各座標点に、国土地理院DEMに基づく対地高度を自動付与するツールです。コースジェネレーターやCADで作成した時点では、各座標の高度値は固定値(例: 全点80m)になっていることが多く、起伏のある現場ではGSDが不均一になります。このツールを通すことで、ウェイポイントごとに地盤高+設定対地高度の絶対高度値が書き込まれた、地形追従用のKMLが得られます。
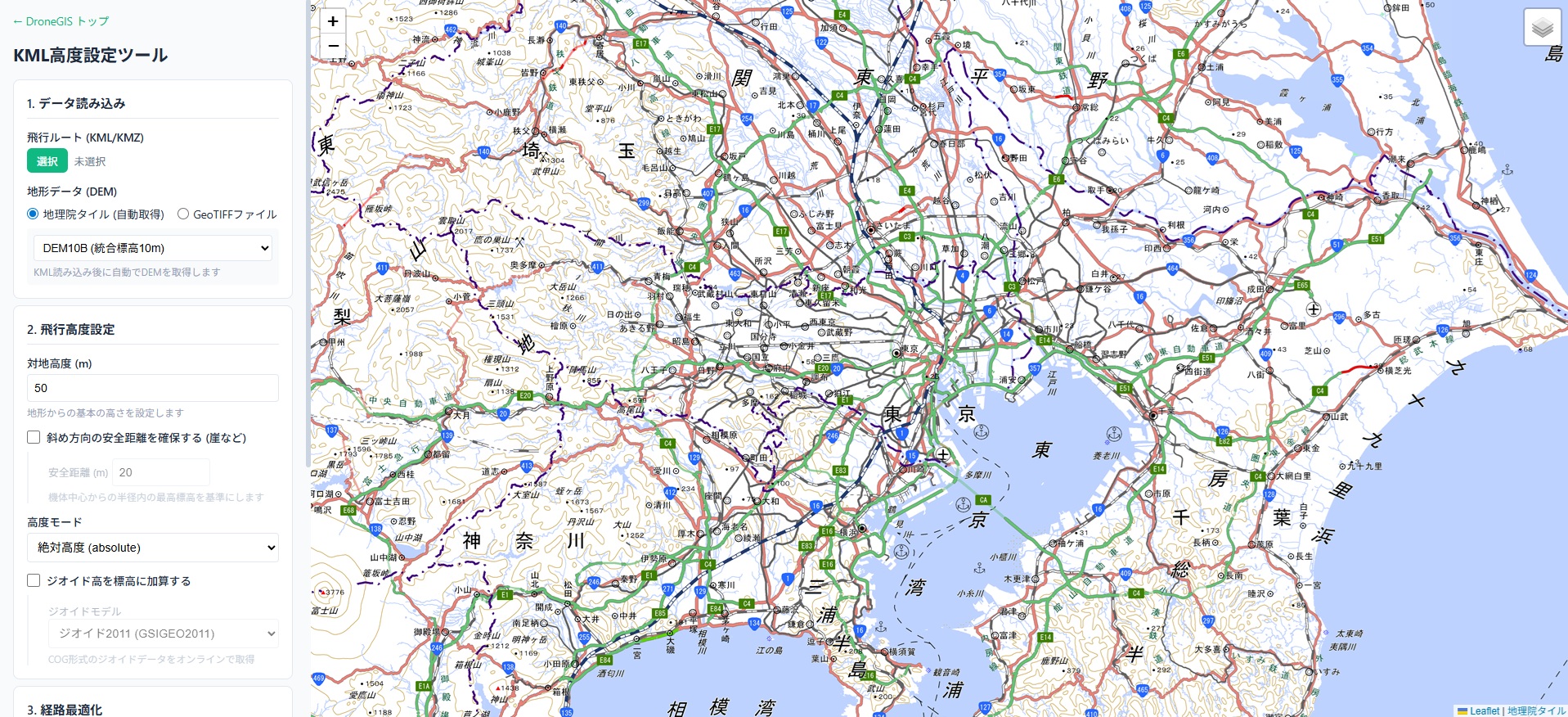
操作はシンプルで、KMLをドラッグ&ドロップし、使用するDEM(DEM10B/DEM5A/DEM1A)と対地高度(AGL)を指定するだけです。DEMの選択は精度と整備状況のトレードオフで決まります。最も整備範囲が広いのはDEM10Bですが、5mメッシュのDEM5A、1mメッシュのDEM1Aが利用可能なエリアでは、それらを優先的に使うことで対地高度の精度が向上します。各DEMの違いはDEMデータの種類と使い分けで詳しく解説しています。
出力KMLは、各座標が「経度,緯度,絶対高度(標高+AGL)」となり、altitudeModeはabsoluteで書き込まれます。これにより、後段のKMLエディターやGoogle Earthで「地形に追従した3次元の経路」として正しく表示されるようになります。
ステップ4: KMLエディターで確認・微調整
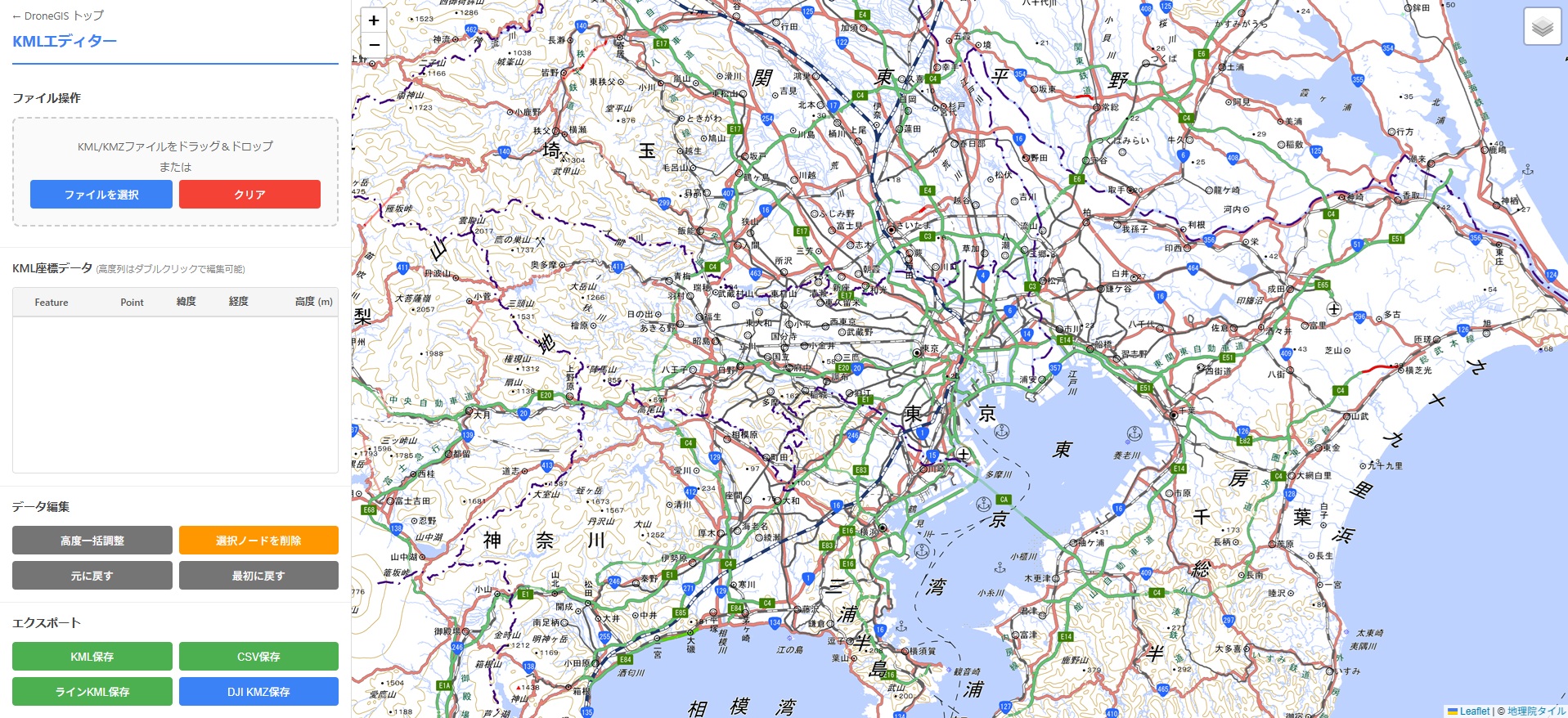
KMLエディターは、KML/KMZの読み込み・可視化・編集・多形式エクスポートに対応したブラウザツールです。前ステップまでで作成したKMLを読み込み、各ウェイポイントの高度や名前、スタイルなどを最終確認します。属性編集だけでなく、不要なPlacemarkの削除や順序の入れ替えもこのツール上で完結します。
ここで重視したい確認項目は次の通りです。
- 高度の連続性: 隣接ウェイポイント間で高度が極端に変動していないか。DEMの欠損や水域上のNoData処理で、特異点が生じることがあります。
- ウェイポイント数: 機体側のミッション上限(DJI Pilot 2の場合99点等)を超えていないか。超えている場合は分割または間引きが必要です。
- 進入・退出経路: 離陸地点から最初のウェイポイント、最終ウェイポイントから帰還地点までの高度が安全か。
- altitudeModeの整合: 全Placemarkがabsoluteで統一されているか(KML高度設定ツール出力後はabsoluteになる)。
編集を終えたら、エクスポート形式を選択して書き出します。KMLエディターは通常のKML、ラインKML、CSV、そしてDJI KMZの各形式に対応しています。DJI KMZ出力時には、機体機種・飛行速度・高度モードを指定でき、DJI Pilot 2 / DJI FlightHub互換のWaylines形式のKMZが生成されます。
Google Earthで見通しを確認する
絶対高度が付与されたKMLは、Google Earth Pro(デスクトップ版)またはGoogle Earth(Web版)で開くと、地形と経路の3D関係をそのまま可視化できます。これは現場踏査の代わりにはなりませんが、机上で「目視外飛行になる区間がないか」「尾根や送電線との高度差は十分か」を素早くチェックできるため、安全レビューの第一段階として極めて有効です。
確認の手順は次の通りです。KMLエディターから書き出したKMLファイルをGoogle Earthで開く(KML高度設定ツールの出力をそのまま開いてもよい)→ 経路を3D視点で回転させ、尾根・建物・送電線などとの位置関係を確認 → 必要なら操縦者の予定地点(離陸点)にPlacemarkを追加し、そこを起点にした視線で遮蔽を確認します。Google Earth Proの「標高断面」機能を使えば、経路に沿った地形断面と飛行高度を同時に重ねて表示することもできます。
見通しに問題が見つかった場合は、KMLエディターに戻って該当区間の高度を引き上げるか、KML高度設定ツールで対地高度の設定値そのものを上げ直します。この往復を素早く行えることが、本ワークフローの実務的なメリットです。
DJI形式KMZでFlightHubへ連携
最終成果物として書き出すDJI形式KMZは、通常のGoogle Earth向けKMZとは内部構造が異なります。DJIのWaylines仕様では、KMZ内部にwpmz/template.kmlとwpmz/waylines.wpmlという固有のファイルが含まれ、機体機種・飛行速度・高度モード・撮影トリガー等の機体制御情報が記述されています。一般的なKMZ(単にKMLをzip圧縮したもの)をDJIアプリやFlightHubに読み込ませても、ミッションとして認識されません。
推奨される運用はDJI FlightHub経由でのインポートです。DJI KMZをFlightHubのWebコンソールにアップロードすると、ミッションとしてクラウドに登録され、紐づけられた機体・送信機(プロポ)に同期されます。FlightHubは飛行履歴・チーム共有・ジオフェンス管理などの機能も備えるため、業務運用ではこの方式が標準となっています。
一方、DJI KMZを送信機(プロポ)のローカルストレージに直接コピーして読み込ませる運用は推奨しません。仕様変更でフォルダ構成や認識条件が変わることがあり、機種・ファームウェアによっては読み込めても飛行設定(機体機種パラメータ等)が一致せず、意図しない挙動につながる恐れがあるためです。FlightHubを通すことで、サーバ側でフォーマット検証と機体マッピングが行われ、こうしたリスクを最小化できます。
運用上の注意点
ワークフロー全体を通じて、安全と精度のために押さえておきたいポイントを整理します。
| 項目 | 内容 |
|---|---|
| 高度基準の整合 | KML高度設定ツールから出力されるのはabsolute(絶対高度)。DJI KMZのwaylinesではEGM96ベースの楕円体高/標高解釈となるため、ジオイド高の差(日本付近で約30〜45m)に注意。ジオイド高と楕円体高の違いを参照。 |
| DEMの精度 | DEM5A/DEM1Aが整備されていない地域ではDEM10Bになる。10mメッシュは細かい起伏や急崖を見落とす可能性があるため、安全マージンを多めに取る。 |
| ウェイポイント数の上限 | 機種・ファームウェアにより上限が異なる(DJI Pilot 2の場合99点等)。超える場合はミッション分割。 |
| 飛行禁止区域 | DID地区・空港周辺・重要施設の確認はDIPS2.0で別途実施。コース作成ツール上でチェックされるわけではない。 |
| 機体・カメラ設定の一致 | FlightHubに登録した機体機種と、KMLエディター側で設定した機種が一致していること。不一致の場合、撮影トリガーや速度設定が反映されないことがある。 |
これらの注意点は単独では些細に見えますが、現場で重なると撮影のやり直しや、最悪の場合は墜落事故につながります。机上での確認(特にGoogle Earthでの3Dレビュー)は、現地でのトラブル対応コストと比べれば極めて低コストですので、必ず実施することを推奨します。