ドローン撮影計画の立て方 - ラップ率・高度・コース設計
撮影計画の重要性
ドローン測量において、撮影計画は成果品質を左右する最も重要な工程です。適切な計画なしに飛行させると、写真の重複不足によるSfM処理の失敗、要求精度を満たさないGSD(地上解像度)、バッテリー不足による撮影範囲の欠損など、さまざまな問題が発生します。
撮影計画で決定すべき主要パラメータは、地上解像度(GSD)、オーバーラップ率(OL)、サイドラップ率(SL)、飛行高度、飛行速度、コースパターンの6つです。これらのパラメータは互いに関連し合うため、要求精度や対象エリアの条件に応じて総合的に設計する必要があります。

地上解像度(GSD)の設計
GSD(Ground Sample Distance)は、撮影画像の1ピクセルが地上で何cmに相当するかを表す指標です。GSDが小さいほど高解像度ですが、それに応じて飛行高度を低くする必要があり、撮影枚数とフライト時間が増加します。
GSDは次の式で算出されます。
例えば、DJI Mavic 3 Enterprise(センサー幅17.3mm、焦点距離12.3mm、画像幅5280px)で高度80mから撮影した場合、GSD = (80 × 17.3) / (12.3 × 5280) ≈ 2.1cm/pix となります。
i-Constructionの「空中写真測量(無人航空機)を用いた出来形管理要領(土工編)(案)」では、要求精度に応じて以下のGSD基準が示されています。
| 区分 | 要求精度 | GSD上限 | 飛行高度目安 |
|---|---|---|---|
| 起工測量・出来形管理 | ±5cm | 1cm/pix以下 | 約30〜40m |
| 部分払い出来高 | ±10cm | 2cm/pix以下 | 約60〜80m |
| 概略土量算出 | ±15cm | 3cm/pix以下 | 約100〜120m |
ラップ率の設定
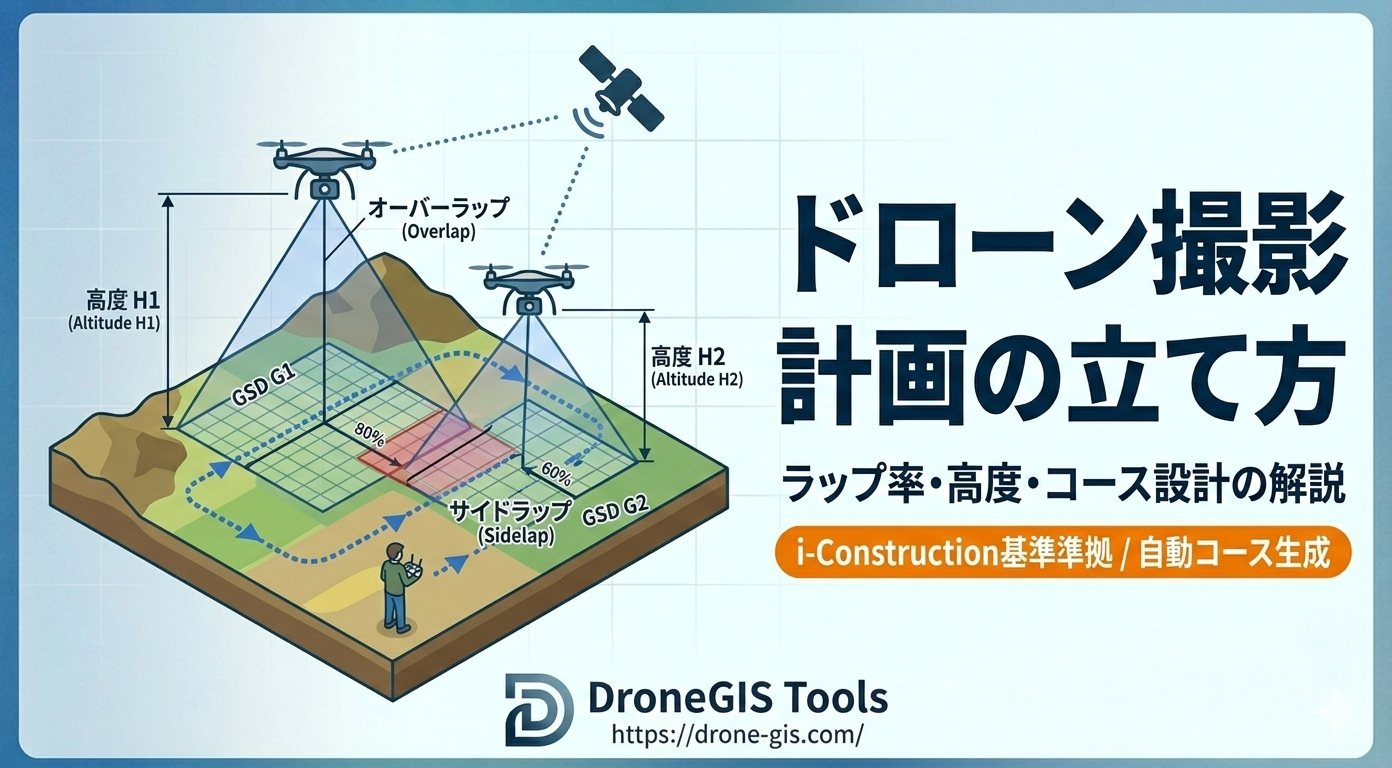
ラップ率は、隣接する写真同士がどの程度重なっているかを表す割合です。進行方向の重複をオーバーラップ(OL)、隣接コース間の重複をサイドラップ(SL)と呼びます。SfM処理で確実に3次元復元を行うためには、すべての地点が最低3枚以上の写真に写っている必要があります。
オーバーラップ率が高いほどマッチングの冗長性が確保され、処理の成功率と精度が向上しますが、撮影枚数が増加しバッテリー消費も大きくなります。一般的な測量案件ではOL 80%・SL 60%を基本とし、起伏の激しい地形や建物が多い市街地ではSLを70%以上に引き上げることが推奨されます。
飛行高度の決定
飛行高度はGSD・撮影範囲・バッテリー効率のバランスで決まる重要なパラメータです。高度を下げるとGSDが向上し精度は上がりますが、1枚あたりのカバー面積が狭くなるため撮影枚数が大幅に増加します。
実務では、要求精度を満たす範囲で可能な限り高い高度を選択し、フライト回数とバッテリー交換の回数を最小化することが効率的です。ただし、日本の航空法では原則として地表から150m以上の飛行には国土交通大臣の許可が必要です。
コース設計のパターン
ドローン測量の飛行コースは、対象エリアの形状や目的に応じていくつかのパターンがあります。最も一般的なのは平行線(ストリップ)パターンで、対象エリアを等間隔の直線コースでカバーします。
平行線パターンは最も効率的で、長方形に近い対象エリアに適しています。コース間隔はサイドラップ率から算出します。クロスパターン(ダブルグリッド)は、平行線パターンに直交する方向のコースを追加したもので、建物の壁面やのり面など垂直方向のテクスチャ取得に有効です。撮影枚数は約2倍になりますが、3Dモデルの品質が大幅に向上します。
コース間隔の計算式は以下の通りです。撮影幅はGSDと画像幅ピクセル数から求められます。
撮影間隔 = 撮影奥行 × (1 - OL/100)
地形追従飛行と安全高度
対象エリアに大きな高低差がある場合、一定高度(海抜基準)で飛行すると、低地ではGSDが大きく(粗く)なり、高地ではGSDが小さく(細かく)なるため、精度が不均一になります。この問題を解決するのが地形追従飛行(Terrain Following)です。
地形追従飛行では、事前にDEM(数値標高モデル)データを用いて地形の起伏を把握し、対地高度を一定に保つようにウェイポイントごとの飛行高度を設定します。例えば、対地高度を80mに設定した場合、地盤高が50mの地点では海抜130mで飛行し、地盤高が100mの地点では海抜180mで飛行します。
地形追従飛行を行う際は、DEMデータの精度と最新性に注意が必要です。古いDEMや低精度のDEMでは実際の地形と乖離がある可能性があるため、安全マージン(最低でも対地30m以上)を確保することが重要です。また、樹木や構造物の高さはDEMに反映されていない場合が多いため、DSM(数値表層モデル)も併用して障害物の確認を行いましょう。
撮影計画チェックリスト
撮影計画を立てる際に確認すべき項目をまとめました。現場に出る前に漏れがないか確認しましょう。
| 項目 | 確認内容 | 備考 |
|---|---|---|
| 要求精度 | 発注者の要求精度を確認し、GSDを決定 | i-Con基準を参照 |
| 対象エリア | 範囲・高低差・障害物の確認 | 現地踏査またはGoogle Earth等で事前確認 |
| 飛行高度 | GSDと航空法の制限から高度を決定 | 対地150m未満が原則 |
| ラップ率 | OL 80%以上、SL 60%以上を基本に設定 | 起伏が大きい場合はSL 70%以上 |
| 撮影枚数 | 総枚数とバッテリー数を見積もる | 予備バッテリーを考慮 |
| 飛行禁止区域 | DID地区・空港周辺・重要施設の確認 | DIPS2.0での飛行計画登録を忘れずに |
| 天候条件 | 風速5m/s以下、曇天が理想 | 影が少ないほうがSfM精度が向上 |
| GCP配置 | 必要点数と配置パターンの計画 | 外周+中央に5点以上推奨 |