概要・機能
KML高度設定ツールは、既存のKMLファイルにDEM(数値標高モデル)とジオイドデータを 使用して高度を設定するツールです。地形追従飛行を行うドローン測量で、 一定の対地高度を維持する飛行経路を生成できます。
地理院DEMタイル(DEM5A/DEM10B)の自動取得 + GeoTIFF対応
ジオイド補正で楕円体高に変換(GSIGEO2011 / JPGEO2024)
地形侵入を絶対に防ぐ安全優先の経路生成
対地高度を保ったままノード数を最小化
絶対高度・相対高度・地形固定の3モード + KML/CSV出力
地形追従飛行とは: 起伏のある地形でも一定の対地高度(AGL)を
維持しながら飛行する方法です。測量精度を均一に保つために重要です。
使い方
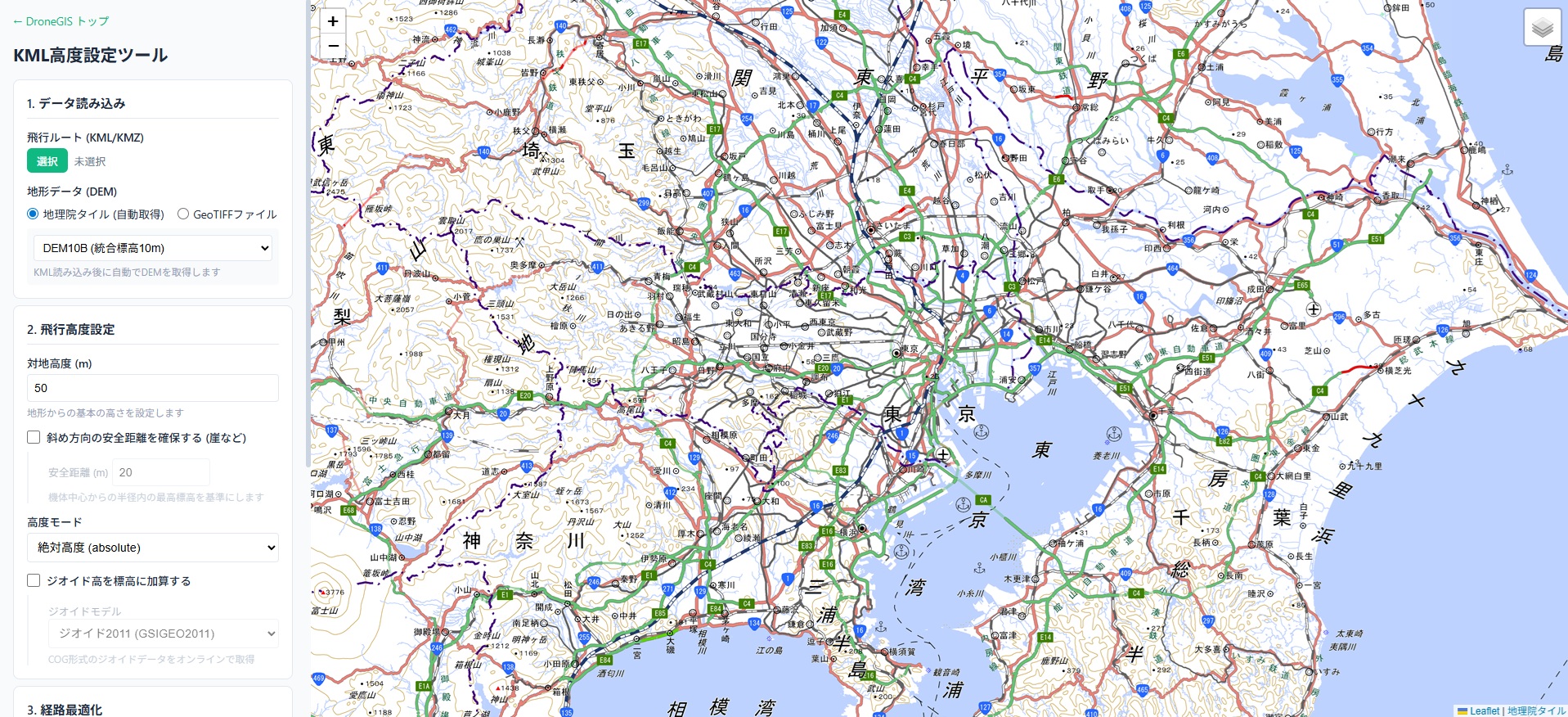
1. ファイルを読み込む
飛行ルートのKML/KMZと、必要に応じてDEMファイルを選択またはドラッグ&ドロップで読み込みます。
DEMはデフォルトの地理院タイル(DEM10B)を使えば自動取得されるので、通常は KML を読み込むだけで OK です。オフライン作業や独自DEMが必要な場合のみ GeoTIFF を指定します。
2. 飛行高度を設定する
- 対地高度: 地表からの高さ(一般に 30〜150m)。必須
- 高度モード: 出力KMLの高度の解釈。多くのドローン自動航行ソフトは
absolute(楕円体高)を期待します - ジオイド高加算: ONにすると
標高 + ジオイド高 = 楕円体高として出力。absoluteモードと組み合わせるのが一般的 - 斜め方向の安全距離(任意): 半径内の最高標高を基準にする保険。崖や急斜面付近で有効
3. 経路を最適化する(任意)
地形追従の細かさとノード数のバランスを調整します。デフォルトでも安全に動作するので、こだわりがなければそのままで OK。
- ノード追加間隔: ラインを細かく分割して地形変化を捕捉(10m 推奨)
- 経路平滑化「対地高度の上ぶれ許容」: 設定値の範囲内でノードを最小化します(デフォルトON・5m)。地形侵入は値に関わらず常に防止されるので、ノードを減らしたいときは値を大きく(例: 10〜20m)すると効率的
4. 「飛行経路を生成」を押す
処理後の経路が地図に赤線で表示され、各点に高度がポップアップ表示されます。総飛行距離・高度範囲・ノード数が下に表示されます。
5. KML / CSV で保存する
- KML保存: 設定した高度モードで出力。Google Earth やフライトプランナーで利用
- CSV保存: No・経度・緯度・飛行高度・地形標高・ジオイド高の表形式(複数ラインなら LineIndex / LineName 列が付きます)
注意: 実飛行前に現地の障害物(建物・樹木・電線など)を必ず目視確認してください。DEMには反映されていない場合があります。
よくある質問
対地高度・標高・楕円体高の違いは?
対地高度(AGL)= 地表からの高さ。あなたが設定する値。
標高(MSL)= 平均海面からの高さ。地理院DEMが返す値。
楕円体高= GPSが使う基準からの高さ。
多くのドローン自動航行ソフトは楕円体高を期待するので、「ジオイド高加算」をONにして高度モードを
標高(MSL)= 平均海面からの高さ。地理院DEMが返す値。
楕円体高= GPSが使う基準からの高さ。
標高 + ジオイド高。多くのドローン自動航行ソフトは楕円体高を期待するので、「ジオイド高加算」をONにして高度モードを
absoluteで出力するのが標準です。
DEM5A と DEM10B はどちらを選ぶ?
迷ったらデフォルトの DEM10B(10mメッシュ・全国カバー) で OK。
都市部や災害想定地域など DEM5A(5m・部分カバー) の対応エリアでは精度が上がりますが、対応外なら自動的にDEM10Bへフォールバックします。
「対地高度の上ぶれ許容」の値の決め方は?
地形より どれだけ上 までなら許せるかの値です。地形への侵入は値に関わらず常に防がれます。
1〜3m = 厳密な地形追従(ノード多)
5〜10m = バランス型(推奨)
20m〜 = ノード激減(直線的になる)
1〜3m = 厳密な地形追従(ノード多)
5〜10m = バランス型(推奨)
20m〜 = ノード激減(直線的になる)
複数のラインや、ポイント形式のKMLは使える?
LineString のみ対応します。1ファイル内に複数のLineStringがあれば一括処理されます(メッシュ状の測量コースなど)。Point/Placemark 単独のKMLは処理されません。
トラブルシューティング
最高高度と最低高度が同じ値になる
解決策: 標高がすべて0として処理されている可能性があります。統計パネルの警告(タイル取得失敗 / GeoTIFF範囲外)を確認してください。範囲が日本国外なら GeoTIFF を直接読み込む必要があります。
ドローンソフトで読み込んだら高度がおかしい
解決策: 多くのドローンソフトは absolute(楕円体高) を期待します。「高度モード = absolute」かつ「ジオイド高加算 = ON」で出力してください。事前に Google Earth で標高プロファイルを表示して確認するのが確実です。
平滑化したのにノード数が変わらない
解決策: 「ノード追加間隔」が 0(無効)だと削減対象が無いため変化しません。10m 程度に設定してください。さらに「対地高度の上ぶれ許容」を大きく(例: 5〜20m)するとノードが減ります。